使用DepthToPosition节点创建位置传递
DepthToPosition获取图像文件中包含的深度数据和相机数据,以创建2D位置(xyz)传递。通过通过相机投影深度并记录每个投影点的xyz位置来创建此通道。可以将DepthToPosition节点与PositionToPoints节点一起使用以创建点云,类似于使用DepthToPoints节点实现的效果。
使用DepthToPosition创建位置传递
|
1.
|
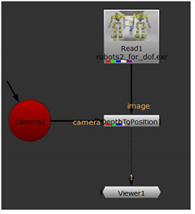
来自3D > Geometry菜单,选择DepthToPosition将节点添加到脚本中。 |
|
2.
|
通过深度读取读取图像并将其连接到image节点的输入。 |
|
3.
|
来自3D 菜单中,选择一个Camera并将其连接到camera DepthToPosition节点的输入。 |
|
4.
|
在里面DepthToPosition DepthToPosition节点的选项卡,从depth下拉式菜单。现在,您应该在查看器中看到一个位置传递。 |

|
5.
|
如果要更改输出通道,请从菜单中选择所需的通道或创建自己的通道。 output下拉式菜单。 |
|
6.
|
设置far控制值,以指定与相机之间的距离,深度值将被忽略。这样可以防止较大的深度值由于浮动数学计算的精度而造成不必要的条带化。 |
DepthToPosition节点允许您从图像的深度遍历创建位置遍历,并将其馈入PositionToPoints以最终创建点云。实际上,三个节点DepthToPosition,PositionToPoints和DepthToPoints可以一起使用,因为DepthToPoints是一个包含DepthToPosition和PositionToPoints节点的Gizmo。
要了解有关生成深度图的更多信息,请参阅生成深度图。